PPO算法原理
参考:
- https://www.jianshu.com/p/9f113adc0c50
- https://zhuanlan.zhihu.com/p/468828804
- https://www.bilibili.com/video/av24724071/?p=4
PG(Policy Gradient)算法
强化学习中,有一个Agent作为我们的智能体,它根据策略\(\pi\)在不同的环境状态\(s\)下选择相应的动作来执行,环境根据Agent的动作,反馈新的状态以及奖励,Agent又根据新的状态选择新的动作,这样不断循环,直到游戏结束,便完成了eposide。在深度强化学习中,策略\(\pi\)是由神经网络构成,神经网络参数为\(\theta\),表示成\(\pi_{\theta}\)。 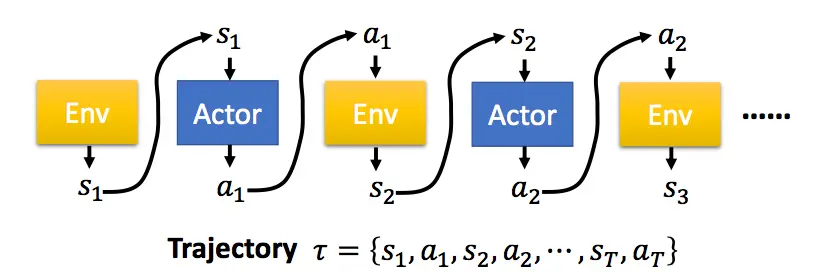 一个完整的eposide序列,用\(\tau\)表示。而一个特定的\(\tau\)序列发生的概率为: \[
\begin{align}
p_{\theta}(\tau) \\
&
=p(s_1)p_{\theta}(a_1|s_1)p(s_2|s_1,a_1)p_{\theta}(a_2|s_2)p(s_3|s_2,a_2)... \\
& =p(s_1)\prod_{t=1}^Tp_{\theta}(a_t|s_t)p(s_{t+1}|s_t,a_t)
\end{align}
\]
一个完整的eposide序列,用\(\tau\)表示。而一个特定的\(\tau\)序列发生的概率为: \[
\begin{align}
p_{\theta}(\tau) \\
&
=p(s_1)p_{\theta}(a_1|s_1)p(s_2|s_1,a_1)p_{\theta}(a_2|s_2)p(s_3|s_2,a_2)... \\
& =p(s_1)\prod_{t=1}^Tp_{\theta}(a_t|s_t)p(s_{t+1}|s_t,a_t)
\end{align}
\]
如果是固定的开局方式,上式中的\(p(s_1)\)可以省略掉。
对于一个完整的\(\tau\)序列,其在整个游戏期间获得的总奖励用\(R(\tau)\)表示。对于给定参数\(\theta\)的策略,其奖励期望为: \[\bar{R}_{\theta}=\sum_{\tau}R(\tau)p_{\theta}(\tau)=E_{\tau \sim p_{\theta}(\tau)}[R(\tau)]\]
对于一个游戏,我们自然希望通过调整策略参数\(\theta\),得到的\(\bar{R}_{\theta}\)越大越好。所以就可以使用下面梯度下降的方式来求解,将\(\bar{R}_{\theta}\)对\(\theta\)求导: 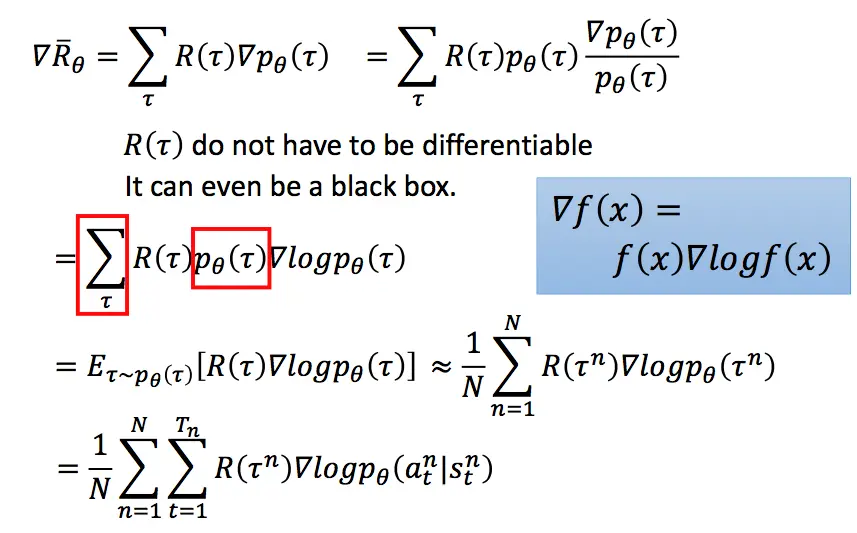
上面的过程中,我们首先利用log函数求导的特点进行转化,随后用N次采样的平均值来近似期望,最后将\(p_{\theta}\)展开,将与\(\theta\)无关的项去掉,即得到了最终的结果。
形象的解释上面的式子:每一条采样到的数据序列都希望\(\theta\)向着自己的方向进行更新。而在总体上,我们希望\(\theta\)向着奖励比较大的那条序列,因此用每条序列的奖励来加权平均他们的更新方向。
假设第三条数据的奖励很大,通过上述式子的更新策略,使得\(p_{\theta}(a_t^3|s_t^3)\)发生的概率更大,以后再遇到\(s_t^3\)这个状态的时候,我们就更倾向于采取\(a_t^3\)这个动作。
所以,一个PG方法的完整过程如下: 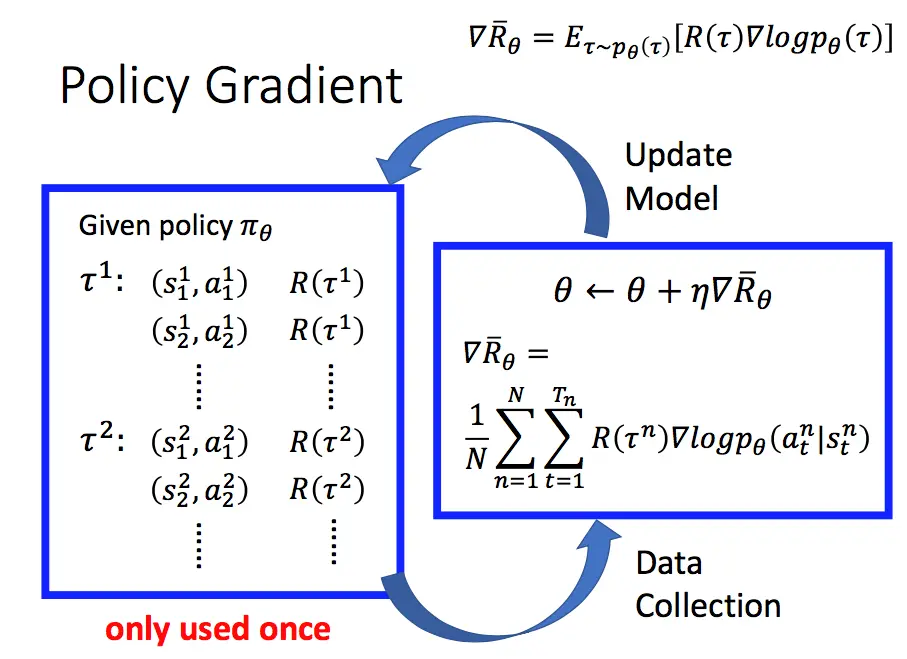 我们首先采集数据,然后基于前面得到的梯度更新公式更新参数,随后再根据更新后的策略再次采集数据,再更新参数,如此循环进行。注意到图中
我们首先采集数据,然后基于前面得到的梯度更新公式更新参数,随后再根据更新后的策略再次采集数据,再更新参数,如此循环进行。注意到图中only used once,因为在更新参数后,我们的策略已经变了,而先前的数据是基于更新前的策略得到的。
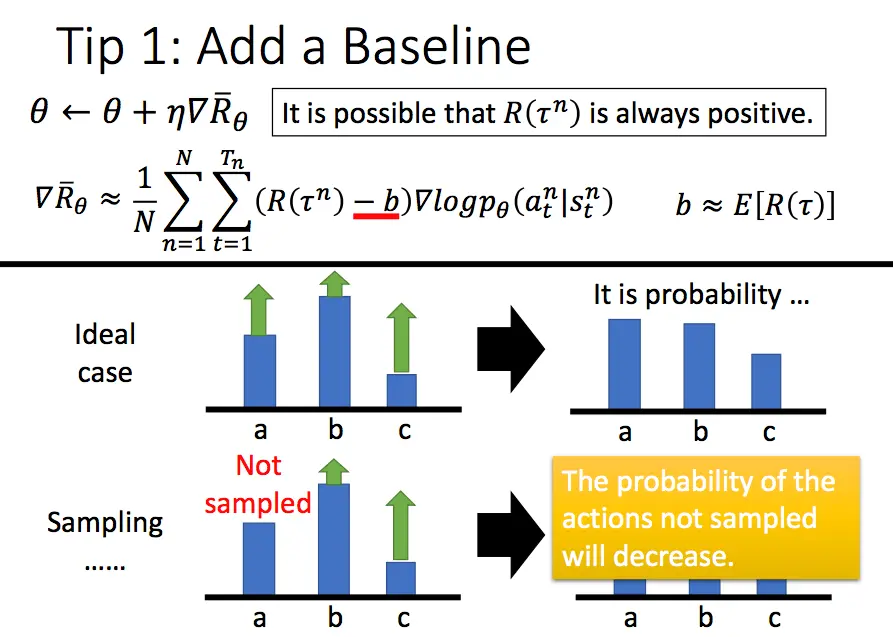
增加一个基线
通过上面的介绍可以发现,PG方法在更新策略时,基本思想就是增加reward大的动作出现的概率,减小reward小的策略出现的概率。假设现在有一种情况,我们的reward无论何时都是正的,对于没有采样到的动作,它的reward是0.因此,如果一个比较好的动作没有被采样到,而采样到的不好的动作得到了一个比较小的正reward,那么没有被采样到的好动作的出现概率会越来越小,这显然是不合适的。因此我们需要增加一个奖励的基线,让reward有正有负。一般增加的基线是所获得奖励的平均值。
增加折扣因子
类似买股票,未来1块钱的价值要小于当前1块钱的价值,因此未来1块钱变成现在的价值,需要进行一定的折扣。
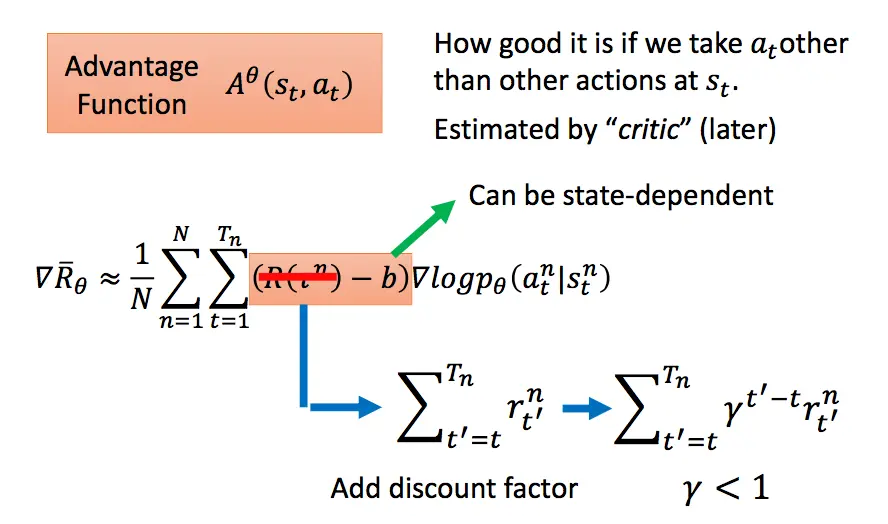
使用优势函数
我们之前介绍的PG方法,对于同一个eposide中的所有数据,使用的奖励都是一样的。这样的做法不够细致,可以将奖励替换成关于\(s_t,a_t\)的函数,我们把这个函数叫做优势函数: \[A^{\theta}(s_t, a_t)=Q_{\pi}(s_t,a_t)-V_{\pi}(s_t)=\sum_{t'>t}\gamma^{t'-t}r_{t'}-V_{\phi}(s_t)\] 其中前半部分表示实际的折扣奖励,后半部分\(V_{\phi}(s_t)\)是拟合的折扣奖励,通过critic来计算得到,它由一个结构与策略网络相同但参数不同的神经网络构成,主要是来拟合从\(s_t\)到终局的折扣奖励。
\(A^{\theta}(s_t, a_t)\)表示在\(s_t\)状态下采用动作\(a_t\)时,实际得到的折扣奖励相对于模拟折扣奖励的优势。模拟的折扣奖励是在\(s_t\)状态下所有采样过动作的折扣奖励的拟合(通过critic模型拟合),因此优势函数代表了采用动作\(a_t\)相对于这些动作的平均优势。
PPO算法
接着上面的讲,PG方法一个很大的缺点就是参数更新慢,因为我们每更新一次参数都需要进行重新采样,这其实是on-policy的策略,即我们想要训练的agent和与环境进行交互的agent是同一个agent。与之对应的是off-policy策略,即想要训练的agent和与环境交互的agent不是同一个agent。
那么为了提升我们的训练速度,让采样到的数据可以重复使用,我们可以将on-policy的方式转换为off-policy的方式。即我们训练的模型是一个actor,与环境交互采样数据的模型使用另一个actor。
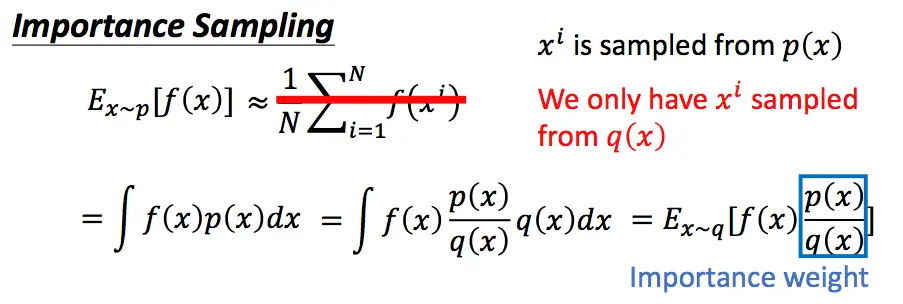 通过这种方式,我们的\(p(x)\)和\(q(x)\)的分布不能差别太大。
通过这种方式,我们的\(p(x)\)和\(q(x)\)的分布不能差别太大。
那么此时我们想要期望奖励最大化,则变为: 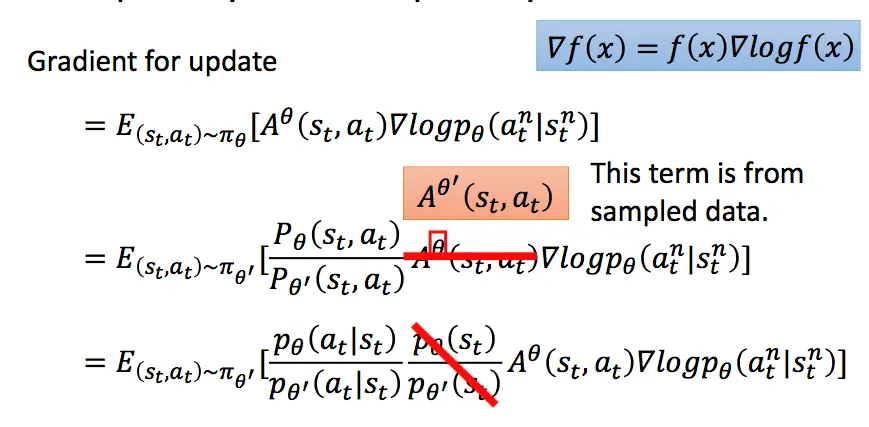 最后一项因为假设两个分布不能差太远,所以认为它们是相等的,为了求解方便,直接划掉。此时似然函数变为:
\[J^{\theta'}(\theta)=E_{(s_t,a_t)\sim\pi_{\theta'}}\bigg[\frac{p_{\theta}(a_t|s_t)}{p_{\theta'}(a_t|s_t)}A^{\theta'}(s_t,a_t)\bigg]\]
最后一项因为假设两个分布不能差太远,所以认为它们是相等的,为了求解方便,直接划掉。此时似然函数变为:
\[J^{\theta'}(\theta)=E_{(s_t,a_t)\sim\pi_{\theta'}}\bigg[\frac{p_{\theta}(a_t|s_t)}{p_{\theta'}(a_t|s_t)}A^{\theta'}(s_t,a_t)\bigg]\]
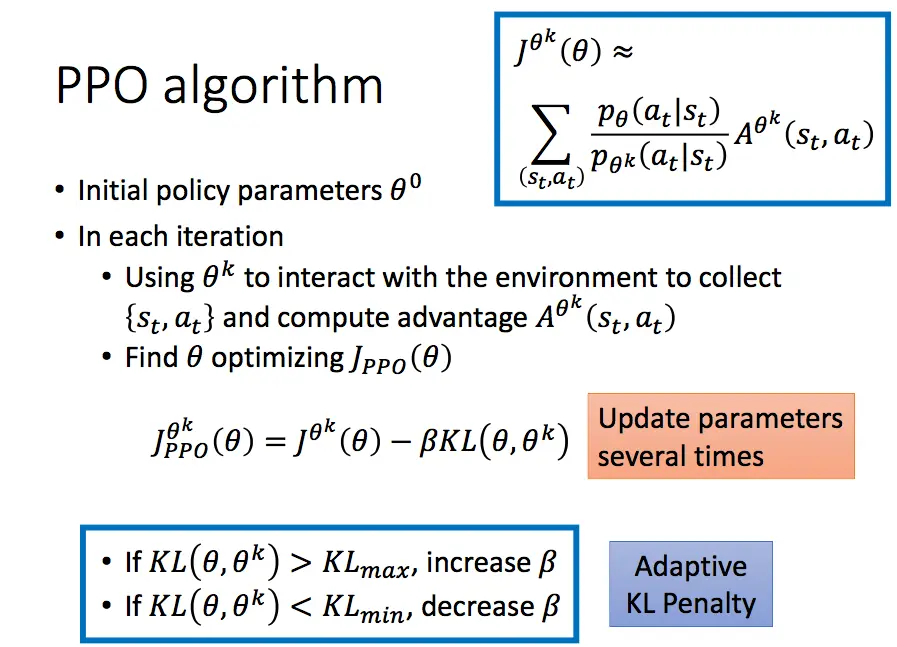
前面介绍了,我们希望\(\theta\)和\(\theta'\)不要差太远。我们可以用KL散度来计算,将其加入PPO模型的似然函数中,变为:

在实际中,我们会动态改变对\(\theta\)和\(\theta'\)分布差异的惩罚,如果KL散度太大,则增加这一部分的惩罚;如果小到一定的值,就减小这一部分的惩罚。基于此,我们得到了PPO算法的过程:
PPO算法还有另一种实现方式,不将KL散度直接放入似然函数中,而是进行一定程度的裁剪:
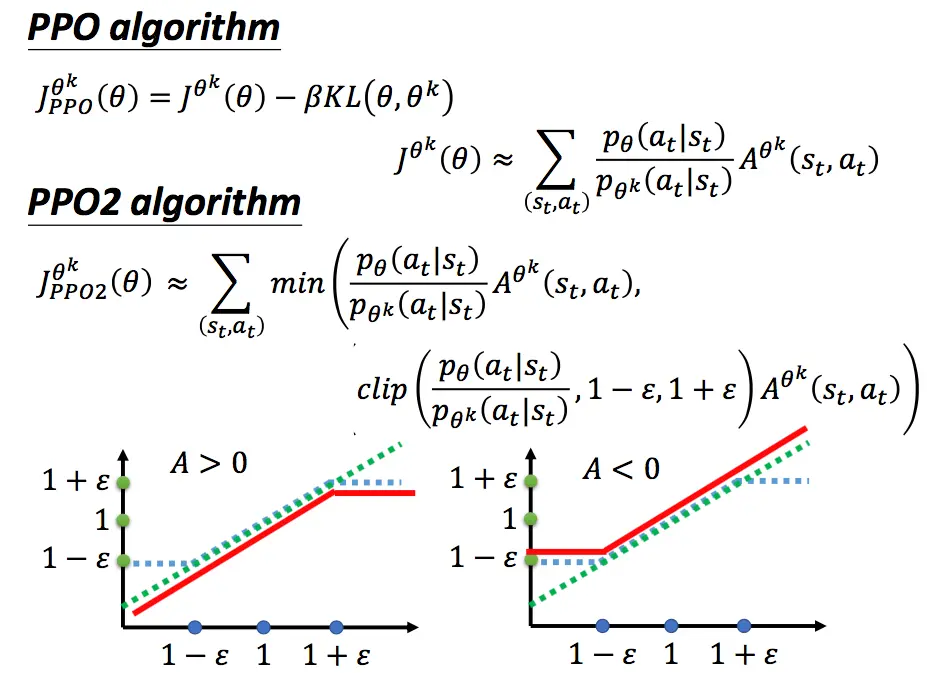 上图中,绿色的线代表min中的第一项,即不做任何处理。蓝色的线为第二项,如果两个分布差距太大,则进行一定程度的裁剪。最后这两项取min,防止\(\theta\)更新太快。
上图中,绿色的线代表min中的第一项,即不做任何处理。蓝色的线为第二项,如果两个分布差距太大,则进行一定程度的裁剪。最后这两项取min,防止\(\theta\)更新太快。
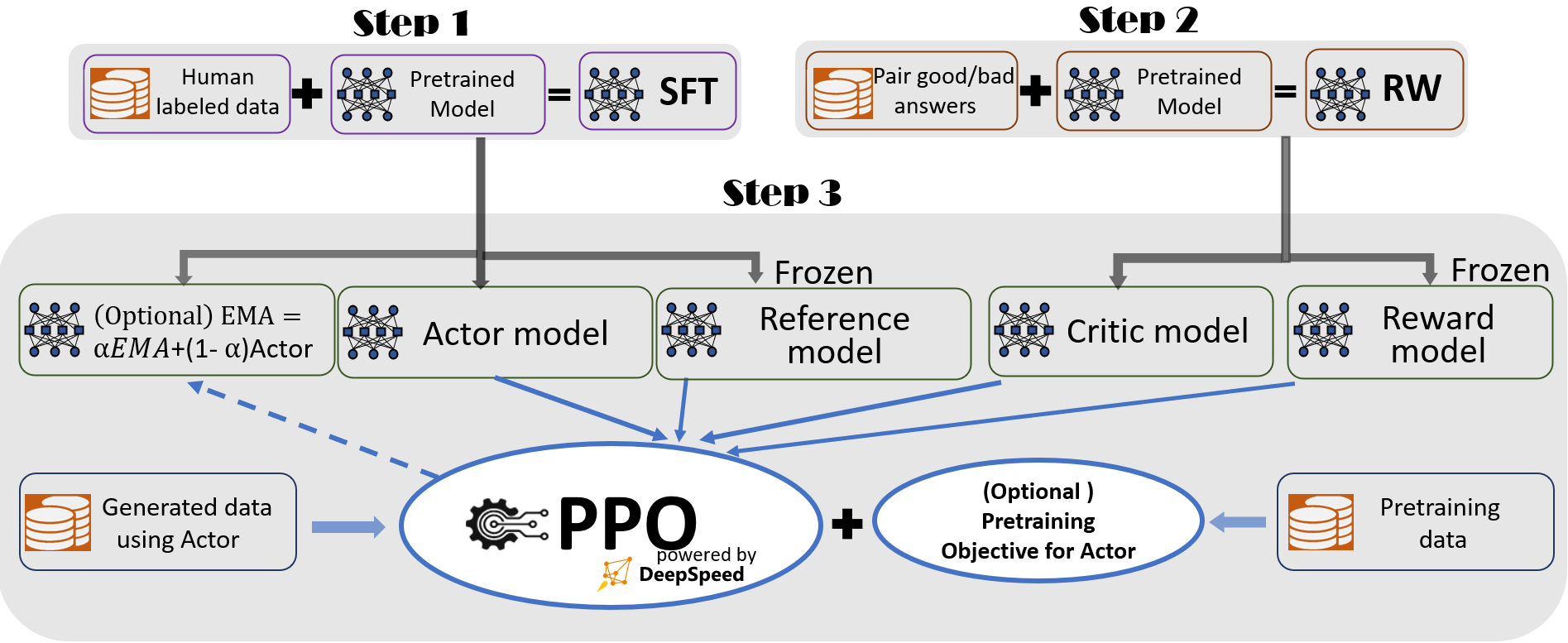
通过上述介绍,我们可以看到PPO有四个网络参数:
- \(\theta\):训练网络,每次都会被更新。(也就是大家说的actor模型)
- \(\theta'\):训练网络副本,负责与环境交互采样数据。(也就是大家说的ref模型)
- \(\phi\):价值模型,拟合折扣奖励。(也就是大家说的critic模型,获取每个state的价值期望)
- \(reward model\): 奖励模型,获取奖励。
PPO共涉及actor model,ref_model,reward model和critic model这四个模型,其实更新参数的模型只有actor model和critic model。
打个比喻来说,PPO的思路是: 0点时,我与环境进行互动,收集了很多数据。然后利用数据更新我的策略,此时我成为1点的我。当我被更新后,理论上,1点的我再次与环境互动,收集数据,然后把我更新到2点,然后这样往复迭代。
但是如果我仍然想继续0点的我收集的数据来进行更新。因为这些数据是0点的我(而不是1点的我)所收集的。所以,我要对这些数据做一些重要性重采样,让这些数据看起来像是1点的我所收集的。当然这里仅仅是看起来像而已,所以我们要对这个“不像”的程度加以更新时的惩罚(KL)。
其中,更新的方式是:我收集到的每个数据序列,对序列中每个(s, a)的优势程度做评估,评估越好的动作,将来就又在s状态时,让a出现的概率加大。这里评估优势程度的方法,可以用数据后面的总折扣奖励来表示。另外,考虑引入基线的Tip,我们就又引入一个评价者小明,让他跟我们一起学习,他只学习每个状态的期望折扣奖励的平均期望。这样,我们评估(s, a)时,我们就可以吧小明对 s 的评估结果就是 s 状态后续能获得的折扣期望,也就是我们的基线。注意哈:优势函数中,前一半是实际数据中的折扣期望,后一半是估计的折扣期望(小明心中认为s应该得到的分数,即小明对s的期望奖励),如果你选取的动作得到的实际奖励比这个小明心中的奖励高,那小明为你打正分,认为可以提高这个动作的出现概率;如果选取的动作的实际得到的奖励比小明心中的期望还低,那小明为这个动作打负分,你应该减小这个动作的出现概率。这样,小明就成为了一个评判官。
当然,作为评判官,小明自身也要提高自己的知识文化水平,也要在数据中不断的学习打分技巧,这就是对\(\phi\)的更新了。